
I’ve been working on dmrshark in the past few months. Most of the improvements can be seen online at the Hungarian network’s live status page, or you can check the project’s GitHub page.
The new features are:
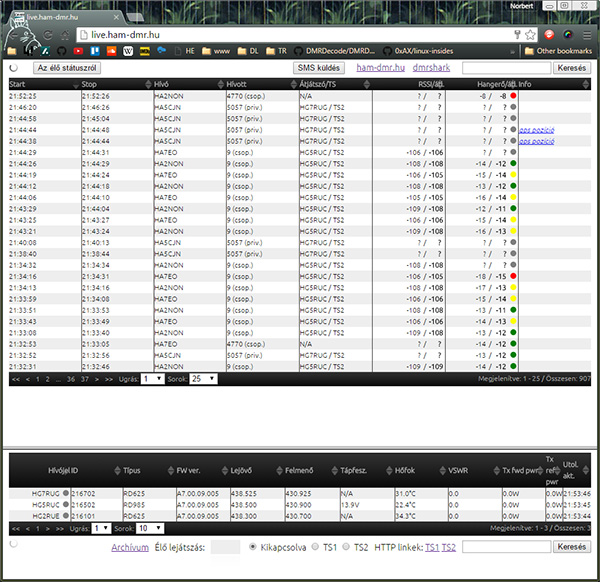
- The info column shows decoded SMS messages and GPS coordinates.
- dmrshark decodes voice calls and calculates their current and average RMS volumes. There’s a circle which varies it’s color according to the volume and helps setting the correct mic gain.
- Several new columns added to the repeater table.
- dmrshark can record decoded voice data to .mp3 files. Recorded files of the Hungarian network can be downloaded from the archive page.
- Live streaming via WebSockets or HTTP are now supported.
- DMR messages can be sent from an external SQL database table (see the Hungarian live status page). Both Hytera and Motorola formats are supported.
- Data packet sending and receiving with full FEC encoding/decoding and selective retransmission.
- SMS format conversion is supported. If you send an SMS from a Hytera transceiver to a Motorola (or Chinese one), dmrshark detects that the message send was unsuccessful and retries sending your message in the opposite (in this case, Motorola) format.
- If you send the message “help” (without quotation marks) to dmrshark’s DMR ID (7777), you can get the supported command list in SMS.
- If the first word of a message to 7777 is an email address, and the other words are the message, dmrshark will send the message as an email to the given destination address.
- If you send the word “ping” to 7777, it will answer with “pong”.
- If you send the word “info” to 7777 with a callsign or DMR ID as the second word, it will give you info back about the given callsign/ID from the callsign book database.
- If you send a message to 7777 with the first word being a callsign and the rest are the message, it will be sent to the APRS-IS system as an APRS message.
- APRS message sending/receiving to and from APRS-IS
- GPS position decoding and sending to the APRS network. Both time and button triggered Hytera GPS position packets can be decoded. DMR data ack is sent after a successful GPS position packet has been decoded, so the transceivers won’t send duplicate position packets unnecessarily.
- Echo service is available on 7777, in both timeslots and both private and group calls. After the echo test ends, dmrshark will send you back your average RSSI and RMS volume values during the echo test. This echo test SMS gets sent also after a normal DMRplus echo test sent to TS2/9990.
- Most of the FEC algorithms are used not only for error checking but for error correction too. Most of the DMR protocol’s packets can be decoded and displayed in the log.
RSS feed for comments
Trackback URL
Trackback URL
 Projects
Projects



do you have any document about HYTERA IPSC Client?
Best Regards